はじめに
こんにちは。オムニむにむにメカメカ南無南無(1) チームでキャチロボ2024に出場していた岩です。報告と技術公開を兼ねて記事を書いておきます。
結果
最初に結果を述べておくと、ベスト4+審査員特別賞でした。結果だけでみると昨年と全く一緒ですが、大会後の満足度や達成感は一段と高いものでした。 以降、開発過程や技術的なところについて記していきます。
競技のルール
今回はフィールドに配置されたワーク (瀬戸しお) を取り、指定のシューティングボックスにシュートする (入れる) 競技です。 キャチロボをご存じでない方は是非公式サイトをチェックして頂けたら幸いです。 catchrobo.net
機体概要
機体動作
うまく動いているときの動画のリンクを貼っておきます。
動作です
— 岩 (@iwamechatronics) 2024年9月15日
本番はハードウェアの摩耗でトラブルを連発させてしまいましたが予選第1試合までは上手くいってました pic.twitter.com/Z1Xq1dMg0q
ハードウェア
全体
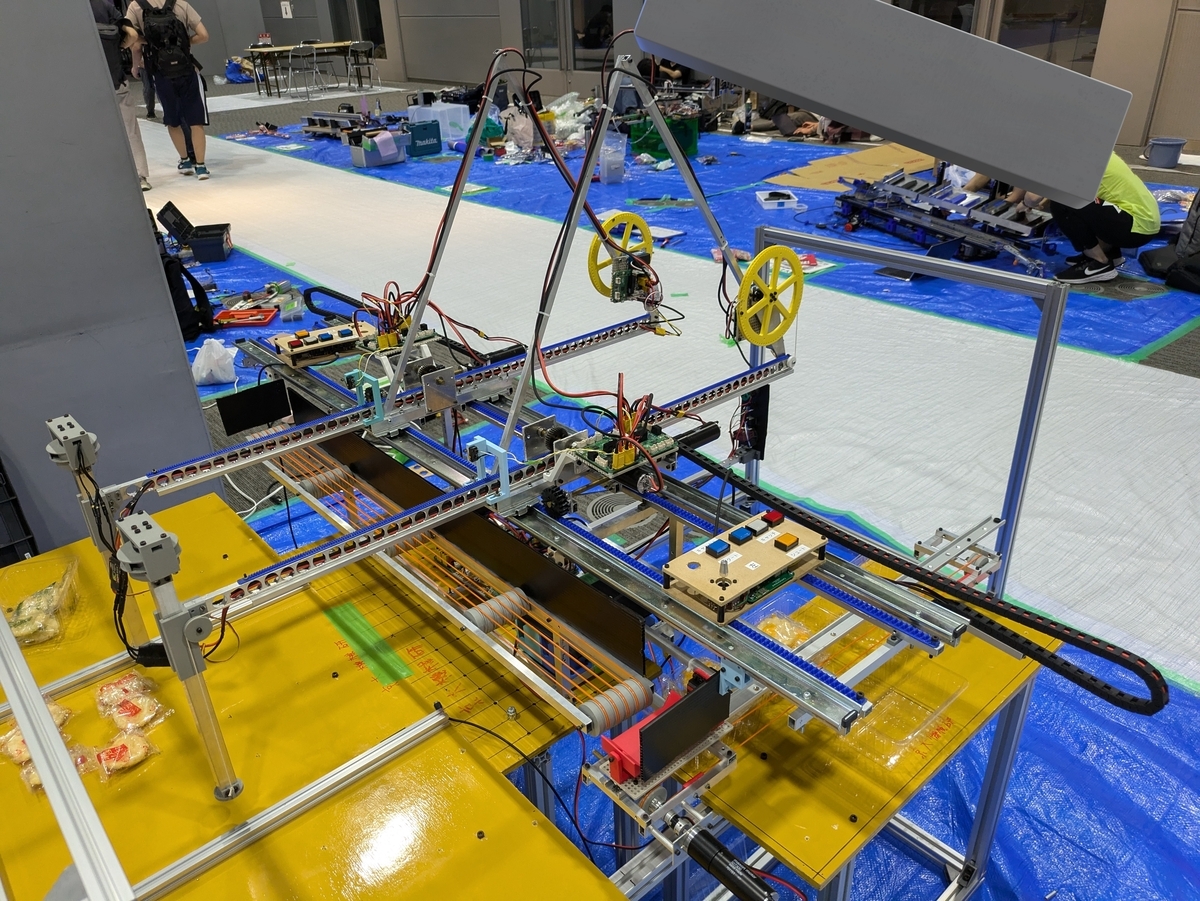
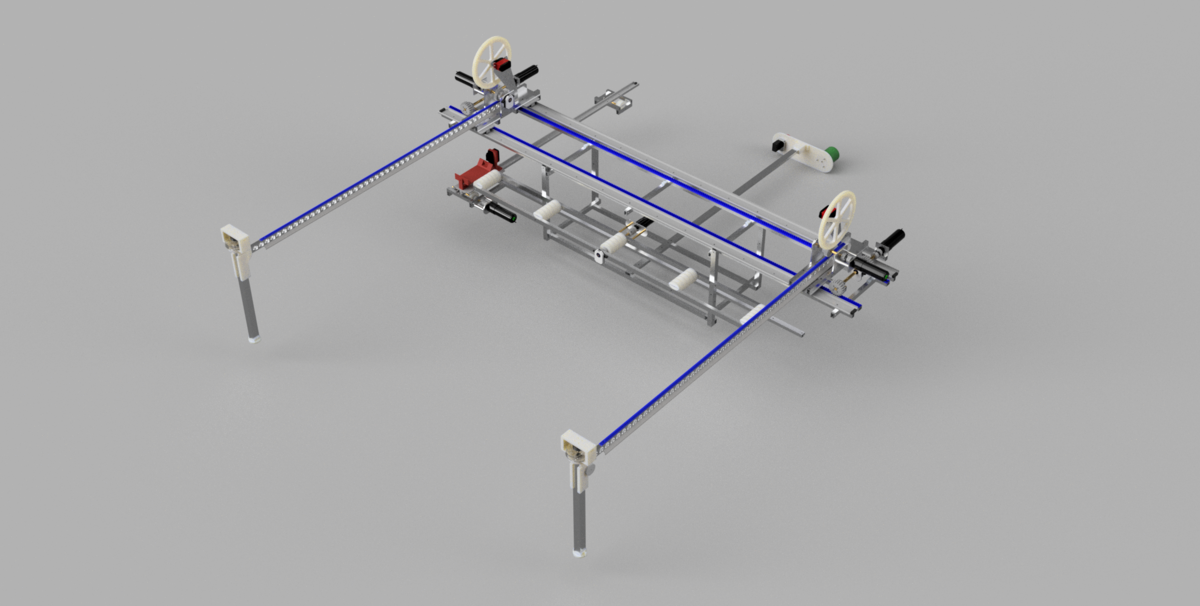 主な機構として吸引機を備えたxyz系のツインアーム、ベルトコンベヤ、シュータを搭載しています。昨年はキャチロボでは一般的なrθ系の機体を作ったので、今年はxyz系の機構に挑戦しました。ワークの色分けを行う必要からワークは1個ずつハンドリングするものとし、全体的なハンドリングスピードを上げるためアームを2本にしました。またベルトコンベヤとシュータを直角に配置し、ワークの自動仕分けとシュートを実現しています。これらを制限重量下に収めるのが設計上最も難しかったです。
主な機構として吸引機を備えたxyz系のツインアーム、ベルトコンベヤ、シュータを搭載しています。昨年はキャチロボでは一般的なrθ系の機体を作ったので、今年はxyz系の機構に挑戦しました。ワークの色分けを行う必要からワークは1個ずつハンドリングするものとし、全体的なハンドリングスピードを上げるためアームを2本にしました。またベルトコンベヤとシュータを直角に配置し、ワークの自動仕分けとシュートを実現しています。これらを制限重量下に収めるのが設計上最も難しかったです。
駆動ユニット
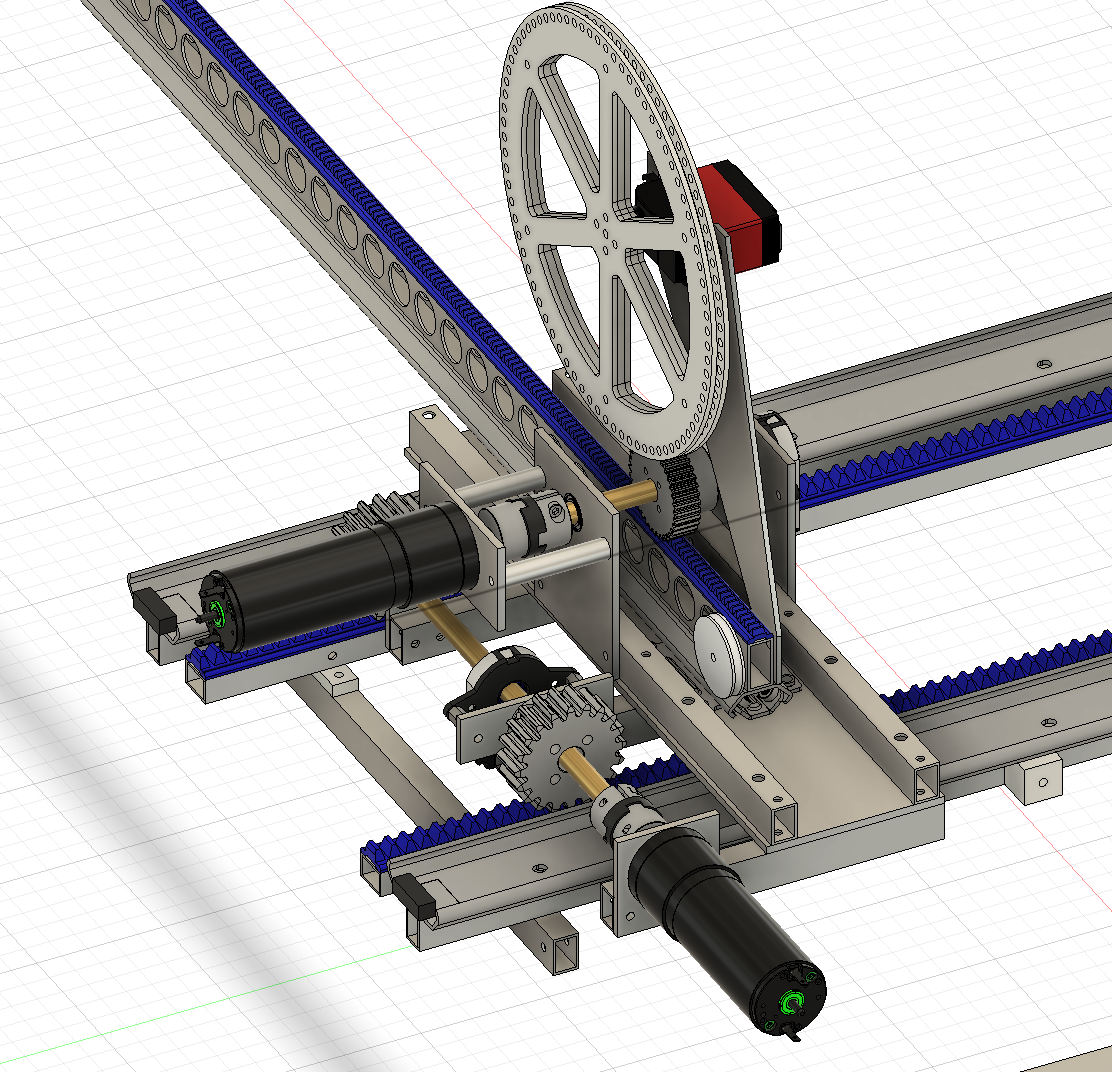 市販のリニアレールにアルミ角パイプを取り付けた直動機構をラックピニオン機構で駆動しています。DCモータにオルダムカップリングを噛ませて真鍮シャフトを伸ばし、クランプ式セットカラーで歯車を取り付けるロボコンではよくある構成です。X軸はアームのヨーイングを拘束するため前後に2つのラックピニオン機構を積んでシャフトで連結し物理的に同期を取っています。
市販のリニアレールにアルミ角パイプを取り付けた直動機構をラックピニオン機構で駆動しています。DCモータにオルダムカップリングを噛ませて真鍮シャフトを伸ばし、クランプ式セットカラーで歯車を取り付けるロボコンではよくある構成です。X軸はアームのヨーイングを拘束するため前後に2つのラックピニオン機構を積んでシャフトで連結し物理的に同期を取っています。
z軸と吸引機構
 z軸は先端重量を軽くし、また重量バランスを改善して軽快な動作を実現するため、アーム後方にサーボモータを用いた巻上機を配置するワイヤ駆動方式を採用しました。また吸引機構はブラシレスモータ+遠心ファン+角パイプで構成され、パイプ上部の遠心ファンがパイプ内の空気を抜いてパイプ下部のワークを吸引する方式となっています。これはワークと遠心ファンの干渉を避けたり操縦時の視認性を上げる意味がありますが、見た目のカッコよさを重視したという背景もあります。
z軸は先端重量を軽くし、また重量バランスを改善して軽快な動作を実現するため、アーム後方にサーボモータを用いた巻上機を配置するワイヤ駆動方式を採用しました。また吸引機構はブラシレスモータ+遠心ファン+角パイプで構成され、パイプ上部の遠心ファンがパイプ内の空気を抜いてパイプ下部のワークを吸引する方式となっています。これはワークと遠心ファンの干渉を避けたり操縦時の視認性を上げる意味がありますが、見た目のカッコよさを重視したという背景もあります。
ベルトコンベヤ
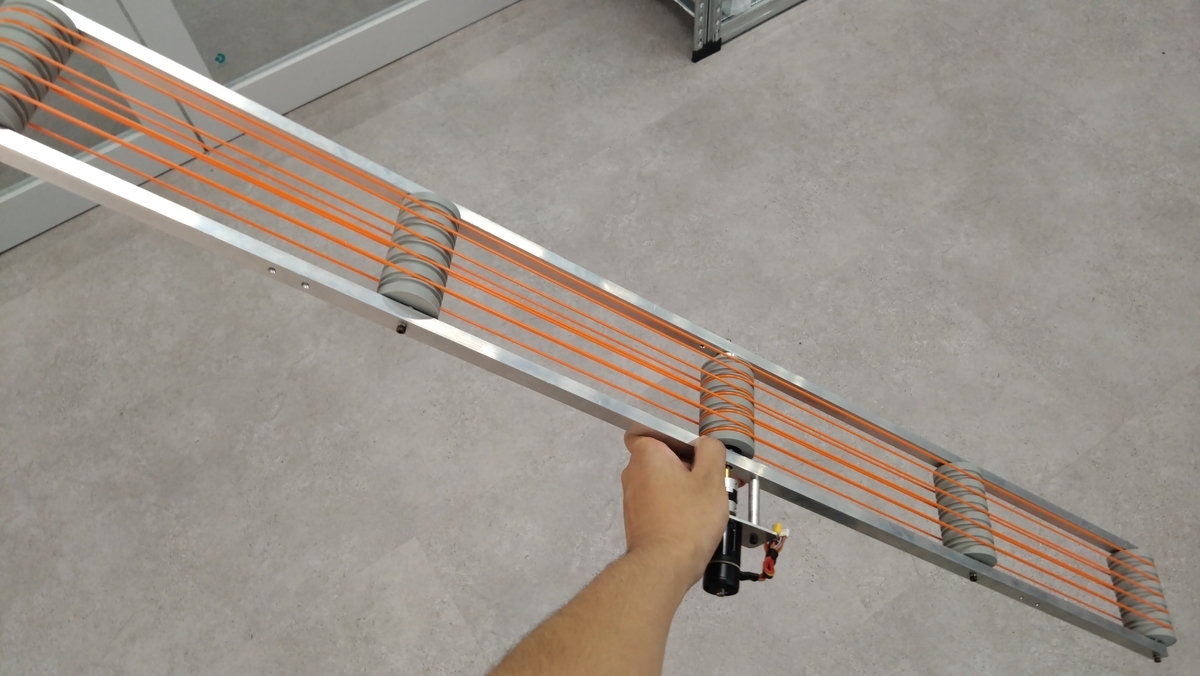 バンコード (丸ベルト) を複数本用いたベルトコンベヤを製作しました。ナイフ型の小手先をつけたはんだごでを用いれば任意の長さでベルトが作れるので便利です。滑車は3Dプリンタ製です。
バンコード (丸ベルト) を複数本用いたベルトコンベヤを製作しました。ナイフ型の小手先をつけたはんだごでを用いれば任意の長さでベルトが作れるので便利です。滑車は3Dプリンタ製です。
シュータ
試作のものがうまくいかなくて大会5日前くらいに急いで作ったものです。丸ベルトを用いたベルト直動っぽいものと、左右に傾くトレーを組み合わせたものです。動作は動画の通りです。シュータの動作を撮ったやつ pic.twitter.com/LUJxG63iFQ
— 岩 (@iwamechatronics) 2024年9月16日
回路
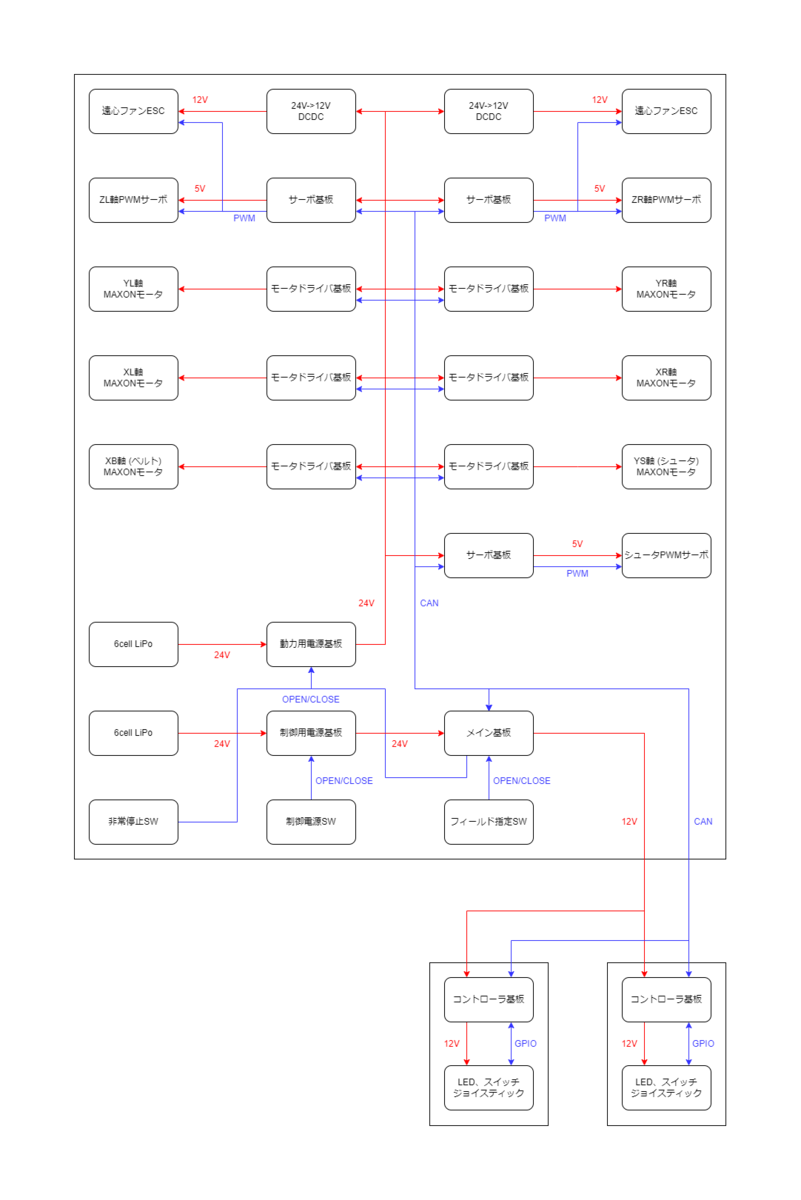 回路は上画像のような構成になっています。部内の基板が信用できなかったため、基板・配線等をフルスクラッチしました。マイコンはすべてRaspberry pi picoを採用しました。これは私と相方の制御知識があまりなく、Arduinoでコードが書けてかつ多少乱雑なコードを書いても軽々動くスペックを有するマイコンを使おうと思ったからです。Raspberry pi picoはCANのハードウェアを持たないため、CANコントローラ (MCP2515) とCANトランシーバを載せてCAN通信を可能にしました。レガシーCANなのでデータレートは1Mbpsです。電源基板は少しこだわって、オペアンプによる電流電圧監視機能を搭載してみました。モータドライバ基板には開発期間を短縮するため市販チップ (VNH5019) を利用しました。秋月電子で1300円 (※購入時) で購入でき、定常12A、最大30A流せてキャチロボのDCモータ程度の電流値なら余裕で耐えることができます。特に面白いものはないですが詳しい回路については記事の最後に公開リンクを張るのでそちらを見てください。なおバグがあったり正常に動かない可能性もあるので参考にされる場合はその点ご了承ください。あと、通信線の配線材は共立電子で買えるスーパーフレックスVVCがおすすめです。柔らかくて適度に太いのでXAコネクタが簡単に圧着できます。
回路は上画像のような構成になっています。部内の基板が信用できなかったため、基板・配線等をフルスクラッチしました。マイコンはすべてRaspberry pi picoを採用しました。これは私と相方の制御知識があまりなく、Arduinoでコードが書けてかつ多少乱雑なコードを書いても軽々動くスペックを有するマイコンを使おうと思ったからです。Raspberry pi picoはCANのハードウェアを持たないため、CANコントローラ (MCP2515) とCANトランシーバを載せてCAN通信を可能にしました。レガシーCANなのでデータレートは1Mbpsです。電源基板は少しこだわって、オペアンプによる電流電圧監視機能を搭載してみました。モータドライバ基板には開発期間を短縮するため市販チップ (VNH5019) を利用しました。秋月電子で1300円 (※購入時) で購入でき、定常12A、最大30A流せてキャチロボのDCモータ程度の電流値なら余裕で耐えることができます。特に面白いものはないですが詳しい回路については記事の最後に公開リンクを張るのでそちらを見てください。なおバグがあったり正常に動かない可能性もあるので参考にされる場合はその点ご了承ください。あと、通信線の配線材は共立電子で買えるスーパーフレックスVVCがおすすめです。柔らかくて適度に太いのでXAコネクタが簡単に圧着できます。
制御
各アームとシュータごとにステータスを表す変数を用意して、無限ループを回しながら状況の変化やボタン押下、時間経過に応じてステータスを遷移させていき、ステータスに応じてモータに指令を送ることで2本のアームとシュータの制御を行いました。何言ってるか分かりませんが素人なりに頑張ったんです。ベルトやシュータに複数のワークが一度に進入しないようにアームの動きはソフトで制限していました。ワークの色はキャッチ時にコントローラの照光スイッチで選択し、後はボーナス得点を狙えるように自動で適切なトレーに運搬するよう制御していました。トレーと色ごとにワークの個数を管理し、あるトレーが一杯だったら別の一杯でないトレーに向かってシュート指令を出すといった感じです。
チーム構成
NHK学生ロボコン2023の京大機械研チームリーダーであるむろ君と2人で出場しました。私が回路と制御、彼がハードウェアを主に担当し、アイデア出しや設計は共同で行いました。2年間同じメンバーでキャチロボに出ましたが、性格こそ違えど足らない部分を補いあえるよき相方でした。
開発スケジュール
4月のルール発表直後に方針を決めてすぐに製作開始、2人とも忙しくリソースが限られる中地道に6月まで製作を進めましたが、7月から8月にかけては私は体調や試験の関係があり、相方は院試であったため作業停滞、9月に入ってから大焦りで2週間ほどで配線・制御・調整を行ったというようなスケジュールでした。なんやかんやで締切律速になってしまうのはロボコニストの宿命なのでしょうか。
資金面
かかった費用はコミコミで20万円ほどと見積もっています。割り勘はするんですが結構きついです。優勝できなかったので赤字ですね。
大会当日のあれこれ
運搬
軽バンにぎりぎり入る大きさだったので分解せずにそのまま会場まで持っていきました。
会場到着、そして重量オーバー
部内の体重計で測った時は15kg程度だった重量は、本番会場の比較的正確なはかりで16.5kgでした。誤差はあるだろうなと思っていましたが、ここまでは想定していませんでした。ロボコニストの皆様はちゃんと正確なはかりを用意しましょう。
テストラン
要らない部品を外し、何とか計量クリア。テストランは自陣のワークを取りきるかどうか程度の出来でした。
試合結果
予選
予選第一試合で自陣のワークを取り切り、ボーナス得点を4つ獲得。自己ベストの60点を取りました。
本戦
本戦はワークが機体に接触していたり、ベアリング用セットカラーのイモネジが緩んで軸が継ぎ手から外れたり、丸ベルトが滑ったり、様々な問題が露呈して思うように得点できませんでしたがなんやかんやで勝ちあがりベスト4まで行きました。
データ共有
機体CADデータ (STEP) と使用した基板類の回路図を公開します。ご自由にお使いください。 drive.google.com
おわりに
キャチロボは近年参加チームも増えますます熱いロボコンとなっています。足回りが要らないので練習スペースもそこまで必要でないし、参加賞として3万円の補助が出たり、部品支援があったりするので自腹でも気軽に出ることができます。私は決してキャチロボの回し者ではないですが、誰にでもお勧めしたいロボコンです。ゆるふわ勢からガチ勢まで、キャチロボにあなたも参加してみませんか?